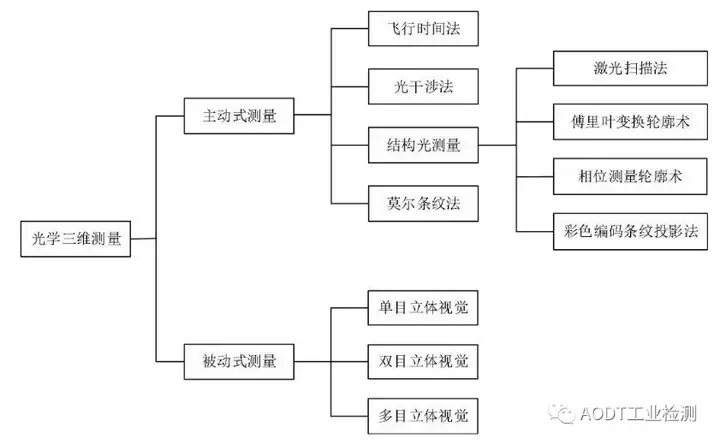
前文已针对2D传感器进行介绍,但由于单幅二维图像无法获取深度信息,因此演化出了基于TOF、双目立体视觉和结构光等为代表的3D视觉传感器,广泛应用于三维测量领域。本文以面结构光传感器为例展开介绍。
一、系统组成
结构光系统主要由结构光投射器、相机组成(单目/双目)。结合光学增强系统辅助计算深度数据;同时可结合彩色相机实现与RGB数据的对齐(RGB-D)。
二、基本原理
早期结构光方法主要使用光栅产生条纹图案,但制造成本高,且易产生误差难以弥补。目前随着数字光处理技术(Digital Light Processing,DLP)的成熟,高精度光栅图像投影技术有效地提升了系统精度及编码能力。
1、系统模型
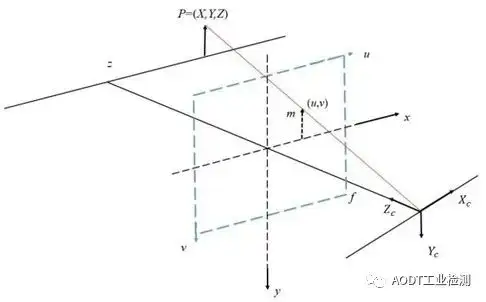
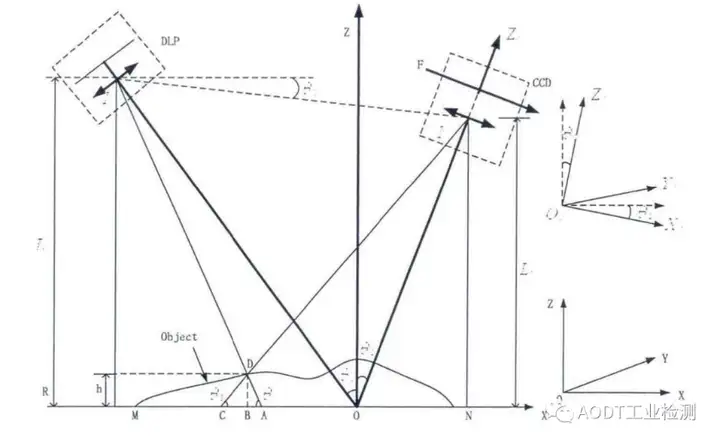
相机模型已在前文进行讲解,在此不再赘述;投影设备模型可理解为相机的反向过程,变换矩阵与相机相似。
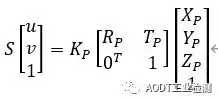
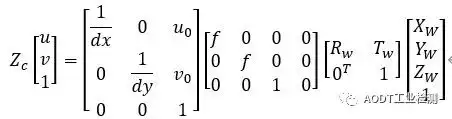
基于系统模型及三角测量原理,结合设备内外参,即可实现坐标系的变换与统一。
2、结构光编码
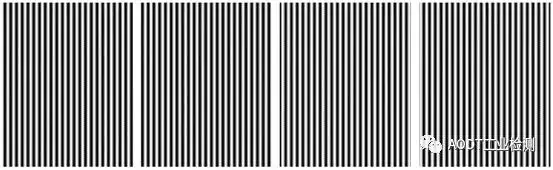
编码结构光将预设的编码图案投射到被测物表面,主要分为空间编码法、时间编码法两种。
空间编码法:向目标投射单幅编码图案进行解码。由于只投射一幅图像,测量速度快,适合动态测量场景;但由于各点运算与周围邻点有关,抗干扰性能较差,且解码较为复杂。
时间编码法:相较于空间编码法,时间编码法在不同时刻投射多幅图像进行解码。精度、抗干扰能力更强,更适用于静态下的三维物体测量。主要投射正弦相移码和格雷码等。
3、结构光解码
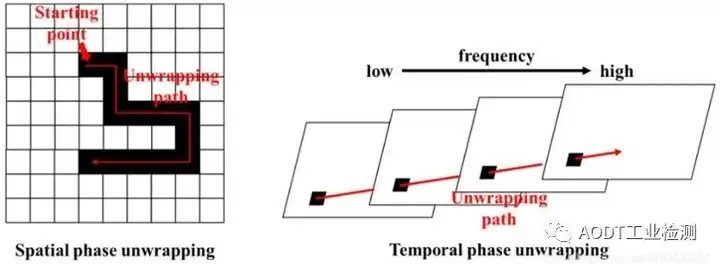
空间相位解包裹:在同一张相位图中,根据某一点与其邻点的相位差进行解包裹(寻找最优的解包裹相位路径)。但各点运算均与周围邻点有关,一旦存在相位混叠、噪声等情况,将会导致解包裹错误,且会向后传递产生“拉丝现象”。经典算法有枝切法、质量图导向法等。
时间相位解包裹:通过在不同时间得到的多个不同频率相位图,在同一位置实现的相位解包裹。每个点的相位只与对应多个相位图上同位置点有关,因此错误并不会传递。经典算法有多频法、多频外差法等。
三、关键参数
以森库莱萨iHAWK100E和a02mT030双目结构光设备为例。




四、相关案例
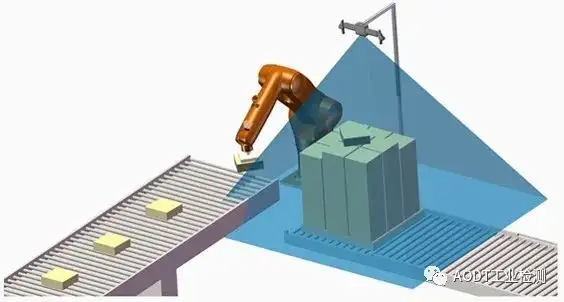
由于结构光传感器的高精度特性,被广泛应用于工业检测、新零售及智慧物流等领域。
体积测量:采用双目结构光方案实时采集物体三维数据,测量可达mm级精度,稳定性高。同时抗环境光干扰能力强,无需特殊照明。除标准物体外,也适用于物流中常见的黑色、不规则及大/小体积物体的测量。

拆、码垛:对于拆、码垛场景,对分拣机器人的视场及景深要求较高。采用双目结构光方案实现大视场、高景深三维成像的同时,可获得mm级六自由度精确定位。
总结
以上便是针对结构光传感器的基本介绍,具体编解码算法等后续单独展开介绍。正是由于以结构光为代表的高精度3D传感器的存在,使得人们实现了三维信息的获取和处理,也解决了工业场景下的高精度三维测量相关难题。


